Moment siły
Wprawienie bryły sztywnej w ruch obrotowy wymaga użycia siły. Jednak nie każda siła spowoduje obrót. Wielkością fizyczną opisującą zdolność siły do wywoływania ruchu obrotowego jest moment siły.
Moment siły \(\vec{F}\) względem punktu \(O\) jest to iloczyn wektorowy wektora wodzącego \(\vec{r}\) i siły \(\vec{F}\).
Wektor wodzący \(\vec{r}\) zaczyna się w punkcie \(O\), względem którego obliczamy moment siły, a kończy się w punkcie przyłożenia siły.
Zgodnie z definicją iloczynu wektorowego wartość momentu siły obliczamy ze wzoru:
Kąt \(\alpha\) jest kątem między wektorem wodzącym \(\vec{r}\) i wektorem siły \(\vec{F}\).
Jednostką momentu siły jest niutonometr \(\text{N}\cdot\text{m}\).
Ponieważ dla kąta \(90^\circ\) funkcja sinus przyjmuje maksymalną wartość, moment siły jest największy, gdy siła działa prostopadle do wektora wodzącego \(\vec{r}\).
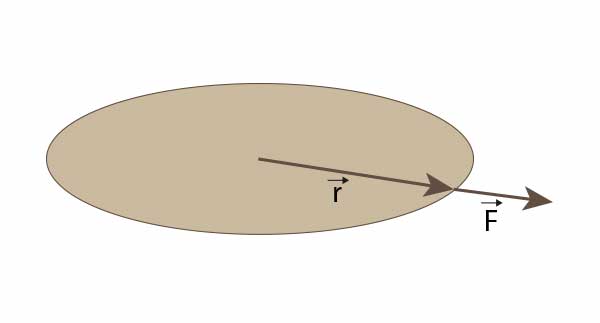
Ponieważ dla kąta \(0^\circ\) lub \(180^\circ\) funkcja sinus ma wartość \(0\), moment siły jest równy zero, gdy siła działa wzdłuż wektora wodzącego \(\vec{r}\), czyli gdy linia działania siły przechodzi przez punkt lub oś obrotu.
Moment siły jest także równy zero, gdy siła jest przyłożona bezpośrednio do osi obrotu. Wtedy \(r=0\).
W prostych zadaniach często wygodniej posługiwać się ramieniem siły \(d\). Ramieniem siły nazywamy najkrótszą odległość od punktu lub osi obrotu do linii działania siły.
Ponieważ \(d=r\sin\alpha\), wartość momentu siły można zapisać także w postaci:
Moment siły opisuje zdolność siły do wywoływania obrotu ciała.
\(\vec{M}=\vec{r}\times \vec{F}\)
\(M=rF\sin\alpha\)
Moment siły jest największy, gdy siła działa prostopadle do wektora wodzącego \(\vec{r}\).
Moment siły jest równy zero, gdy linia działania siły przechodzi przez punkt lub oś obrotu.
Jeżeli \(d\) oznacza ramię siły, czyli najkrótszą odległość od punktu lub osi obrotu do linii działania siły, to \(M=Fd\).
Zauważ, że moment siły, czyli moment obrotowy, jest wektorem. Jak określić kierunek i zwrot tego wektora? Zgodnie z definicją iloczynu wektorowego wynik takiego iloczynu jest wektorem prostopadłym do płaszczyzny wyznaczonej przez wektory \(\vec{r}\) i \(\vec{F}\), a jego zwrot określa reguła śruby prawoskrętnej.
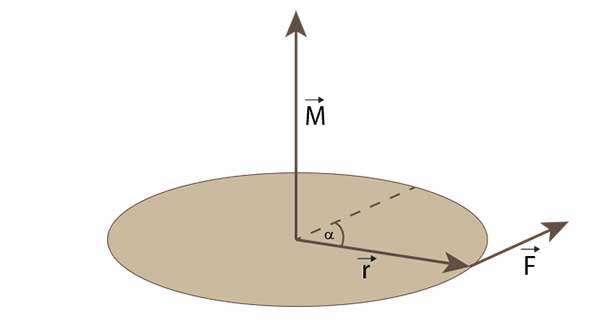
Powyższy rysunek ilustruje powstawanie momentu siły. Siła \(\vec{F}\) jest przyłożona do brzegu krążka. Wektor \(\vec{r}\) jest wektorem wodzącym punktu przyłożenia siły. Jego początek znajduje się na osi obrotu, a koniec w punkcie przyłożenia siły. Moment siły ma zwrot ku górze, zgodnie z regułą śruby prawoskrętnej.
Na rysunku pokazano też, jak znaleźć kąt między wektorami. Ponieważ oba wektory mają różne punkty przyłożenia, należy dokonać przesunięcia równoległego jednego z nich tak, aby początki obu wektorów pokrywały się. Dopiero wówczas zaznaczamy kąt między tymi wektorami. Krążek będzie się obracał przeciwnie do wskazówek zegara.
Zauważ, że jeżeli siła działa stycznie do brzegu krążka, to moment siły jest maksymalny, ponieważ sinus kąta \(90^\circ\) przyjmuje maksymalną wartość. Natomiast gdy linia działania siły przechodzi przez oś obrotu, moment siły jest równy zeru, więc siła nie wywołuje obrotu krążka.

Ćwiczenia
Zwiększ populację dziobaków, rozwiązując krótkie zadania i ćwiczenia związane z tą lekcją.
 1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
Nie jesteś zalogowany.
Z jajka nic się nie wykluje, a Twoja populacja dziobaków nie przetrwa po opuszczeniu strony... Zaloguj się
Aby otworzyć złote jaja, musisz posiadać Plan Premium.
Zadania z rozwiązaniami
Zadanie nr 1.
Klucz do odkręcania śruby ma długość \(r=0{,}30\ \text{m}\). Na koniec klucza działa siła o wartości \(F=80\ \text{N}\). Siła tworzy z kluczem kąt \(\alpha=60^\circ\).
Oblicz:
- ramię siły \(d\),
- wartość momentu siły względem osi śruby,
- wartość momentu siły, gdyby ta sama siła działała prostopadle do klucza.
📑 MODUŁY KURSU
Pełne śledzenie postępów kursu w planie Premium
© medianauka.pl, 2017-02-10, A-3466/1720
Data aktualizacji artykułu: 2026-07-06




